Los sensores de proximidad inductivos detectan objetos metálicos (metales ferrosos y no ferrosos). Un sensor inductivo consta de tres partes principales: bobina inductiva con oscilador, circuito de evaluación y circuito de salida. Cuando se aplica una señal oscilante a la bobina, se crea un campo magnético. La presencia de metal altera el campo magnético y es detectada por el circuito de evaluación, que activa una señal de salida.
La tecnología de detección inductiva permite detectar objetivos sin contacto, ignorando la mayoría de las influencias ambientales, como la luz reflejada, la suciedad, los residuos y el aceite.
Las aplicaciones típicas de los sensores de proximidad inductivos incluyen la detección de dientes de engranaje (RPM), el monitoreo de velocidad, la detección del final del recorrido y el posicionamiento/cierre en diversas industrias, incluidos plásticos, embalajes, alimentos y bebidas, agricultura, transporte, minería y equipos móviles.
Algunas características clave de los sensores de proximidad inductivos incluyen:
- Libre de mantenimiento y resistente al desgaste
- Detección sin contacto
- Insensible a la acumulación moderada de polvo y suciedad.
- Salida de estado sólido para conmutación sin rebotes y larga vida útil.
- Impermeable
- Excelente resistencia a golpes y vibraciones.
- Ampliamente resistente a los productos químicos
Hay varios factores a tener en cuenta al seleccionar el mejor sensor de proximidad inductivo para su aplicación. Estas consideraciones se pueden dividir en cinco categorías:
1. Detalles del Objetivo de Detección
Es fundamental identificar el tamaño físico y las propiedades materiales del objetivo para determinar el rango de detección requerido.
- Tamaño del objetivo
- Aunque los sensores inductivos detectan metal, el objetivo debe ser lo suficientemente grande como para interrumpir el campo de detección. El tamaño mínimo del objetivo se define según EN 6094752 con un objetivo cuadrado de 1 mm de espesor con la longitud de cada lado igual a la que sea mayor: 1) El diámetro del círculo inscrito en la superficie de detección activa, o 2) Tres veces la distancia operativa nominal.
- Material de destino
- Es importante identificar el material de destino, ya que la mayoría de los metales son compuestos y no puros. Los datos técnicos y las especificaciones de los sensores inductivos se basan en acero ferroso de acuerdo con la norma EN 6094752. Si el material de destino es acero inoxidable, aluminio, latón, cobre, etc., será necesario aplicar un factor de reducción al rango de detección (consulte la Figura 1, Cuadro de factores de reducción del rango de detección).

- Distancia de detección
- La distancia de detección de los sensores inductivos suele oscilar entre 1 mm y 40 mm. Los sensores inductivos pueden detectar metales ferrosos y no ferrosos, pero no necesariamente en el mismo rango de detección. Por ejemplo, una especificación técnica de un sensor inductivo estándar indica un rango de detección de 10 mm (esto se haría utilizando un objetivo de acero ferroso). Ese mismo sensor solo tendría un rango de detección de entre 2,5 mm y 10 mm, según la composición del metal.
- Hay algunas opciones para superar estos desafíos de aplicación del mundo real:
- Utilice un modelo de rango extendido, como una versión con rango de detección doble (2x) o triple (3x). La mayoría de las aplicaciones requieren Cierta reducción del rango de detección debido al tamaño del objetivo, el material y el entorno. Una determinación conservadora del rango de detección requerido sería duplicar la distancia de detección real. Por ejemplo, si el objetivo estará a 4 mm de la cara del sensor, seleccione un sensor con un rango de detección de 8 mm. Por supuesto, también se debe considerar el entorno circundante.
- Si es posible, utilice un sensor que no esté enrasado ni protegido (consulte la sección Instalación del sensor a continuación en el Consejo 2), que proporciona rangos de detección más amplios que los sensores enrasados o protegidos.
- Muchos fabricantes de sensores ofrecen una tecnología inductiva avanzada (también más costosa) que puede detectar metales ferrosos. y objetivos no ferrosos a la misma distancia, es decir, factor 1, detección universal, etc.
- Velocidad
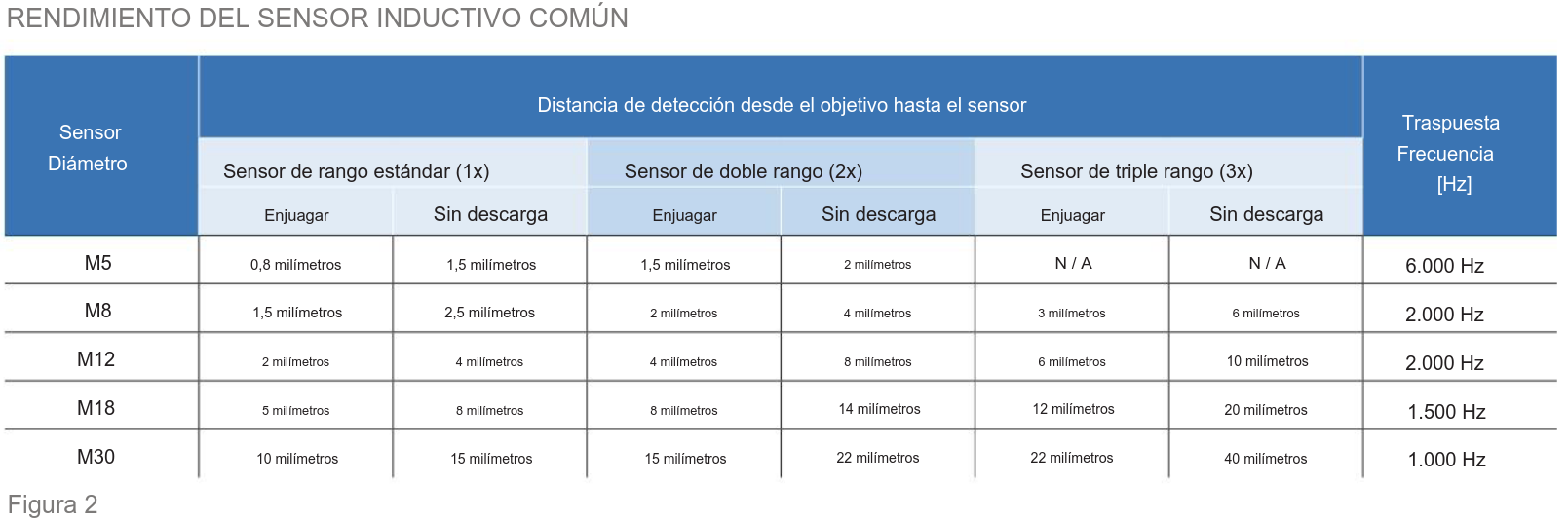
- Los sensores inductivos ofrecen velocidades de conmutación más rápidas en comparación con los sensores de proximidad capacitivos y pueden ser tan rápidos como algunos sensores fotoeléctricos. En general, cuanto mayor sea el tamaño del sensor, más lenta será la velocidad/ frecuencia de conmutación del sensor. Además, la frecuencia de conmutación para las salidas SCR de CA (25 Hz o 25 veces por segundo) es significativamente más lenta que la de las salidas de estado sólido de CC (hasta 6 kHz o 6000 veces por segundo). Para obtener una descripción general de alto nivel de los rangos de detección típicos y la frecuencia de conmutación por tamaño de carcasa, consulte la Figura 2, Rendimiento común de los sensores inductivos. Hay muchos sensores inductivos especializados a tener en cuenta, pero la tabla proporciona una guía inicial para la selección.
2. Requisitos de Integración
Los requisitos de integración suelen estar determinados por los demás componentes y la configuración de la aplicación. A menudo, estos requisitos no se pueden modificar y, por lo tanto, es importante comprenderlos al principio del proceso de selección de un sensor inductivo.
- Voltaje de suministro: Los sensores inductivos están disponibles para usarse con voltajes de suministro de entrada de aplicaciones CA, CC o incluso CA/CC.
- Salida del sensor: Las opciones de salida comunes disponibles incluyen normalmente cerrado (NC) y/o normalmente abierto (NO), NPN y/o PNP (CC), SCR (CA), MOSFET (CA), salida analógica (CC), NAMUR o comunicación IO Link.
- Instalación del sensor: Los sensores inductivos están disponibles en carcasas cilíndricas roscadas, cilíndricas lisas y rectangulares.
- El tipo de cuerpo más común es el cilíndrico roscado en M8, M12, M18 y M30. Estas carcasas cilíndricas suelen ofrecerse en cuerpos cortos y largos, en referencia a la longitud del sensor. Algunos sensores están diseñados para montaje empotrado (también denominados blindados), pero otros están diseñados para montaje no empotrado (también denominados no blindados), lo que permite una sensibilidad adicional en el lado de la cara de detección.
- Si se instalará más de un sensor inductivo, investigue las instrucciones de funcionamiento, ya que los sensores pueden interferir entre sí. Hay sensores inductivos disponibles que se pueden programar para funcionar sin interferencias para este tipo de aplicación
-
Estilo de terminación: Por lo general, los sensores inductivos solo tienen dos opciones de conexión para la alimentación de entrada y la señal de salida: desconexión rápida (M8 o M12) o un cable con conductores sueltos. Las opciones de desconexión rápida son populares debido a que permiten un reemplazo más rápido del sensor y una resolución de problemas de conectividad más sencilla. Para sensores inductivos más grandes, ocasionalmente se ofrecen conexiones de terminales.
3. Entorno Operativo
El entorno operativo de un sensor de proximidad inductivo puede limitar en gran medida las opciones de selección. La exposición a aceites, productos químicos, condiciones de lavado, ruido, golpes o vibraciones extremas o la presencia de materiales peligrosos pueden requerir capacidades de sensor especializadas.
- Material de la carcasa
-
Los materiales de la carcasa del sensor inductivo son latón niquelado, acero inoxidable o plástico (como policarbonato). Las carcasas de metal son las más comunes debido a su durabilidad y protección contra el posible contacto con el objetivo. Las carcasas de plástico pueden ser beneficiosas cuando se considera la exposición a sustancias químicas específicas o como una solución más rentable.
-
- Rango de temperatura de funcionamiento
-
Se debe tener en cuenta la temperatura mínima y máxima que experimentará el sensor durante el funcionamiento y el almacenamiento.
-
- Clasificaciones ambientales o a prueba de explosiones
-
Los estándares técnicos como las clasificaciones IP y NEMA son ahora normas de la industria que brindan información sobre las condiciones en las que un sensor puede funcionar para uso en interiores y exteriores, presencia de polvo/escombros y exposición al agua.
-
Otra consideración ambiental es la de los materiales peligrosos. De manera similar, las normas técnicas de OSHA y la Asociación Nacional de Protección contra Incendios brindan clasificaciones estándar de la industria (Clase, División, Grupo) para el funcionamiento en entornos peligrosos.
-
Para equipos móviles y aplicaciones automotrices, a menudo se requiere una aprobación de tipo E1 debido a las condiciones extremas y la seguridad vial pública. Si el sensor podría estar expuesto a picos de alto voltaje (es decir, una batería que se desconecta de un generador), considere un sensor con clasificación de protección contra descarga de carga SAEJ1113-11.
-
- Protección contra ruido externo
- La protección avanzada contra ruido reducirá las detecciones falsas causadas por vibraciones, picos de tensión, descargas electrostáticas, transitorios/ráfagas eléctricas, perturbaciones conducidas por cables, campos magnéticos de frecuencia industrial y campos electromagnéticos de radiofrecuencia radiados.
- Estos tipos de interferencias son cada vez más comunes en las aplicaciones. La selección de un sensor inductivo con aprobación de tipo E1, incluso si la aplicación no es un equipo móvil, proporcionará protección adicional contra el ruido
4. Planes para el Futuro
-
Algunos fabricantes ofrecen sensores con comunicación IO Link, que proporcionan capacidades incomparables en comparación con los sensores tradicionales. El usuario puede programar la salida del sensor, implementar retardos de tiempo personalizados y utilizar funciones lógicas. Estos beneficios básicos reducen el inventario y permiten una personalización inmediata y flexible para su aplicación utilizando sensores estándar.
-
Además de eso, hay muchas otras capacidades. El registro de datos (contador de detección, frecuencia de conmutación, baja temperatura, alta temperatura) brinda visibilidad de posibles ineficiencias operativas. Las alarmas personalizables (temperatura o rango de detección) permiten que se realice un mantenimiento programado antes de que falle el sensor.
-
Las funciones especiales como el monitoreo de velocidad rotacional pueden calcular la detección de frecuencia para verificar las condiciones de exceso o falta de velocidad. La función de contador de RPM permite al usuario ingresar la cantidad de activaciones necesarias para cambiar la salida (es decir, la cantidad de dientes en un engranaje) para que el sensor proporcione una salida una vez por revolución.
-
Al usar la capacidad analógica a través de IO-Link, el sensor puede brindar información de posición de un objetivo o proporcionar control de calidad para garantizar que se esté utilizando el metal correcto.
-
A medida que la digitalización permite que los datos se conviertan en información valiosa, todas las empresas están en camino de implementar funciones “inteligentes”. La selección del sensor es el momento adecuado para considerar estas capacidades.
Si estás buscando un sensor inductivo y requieres ayuda en escoger el modelo que mejor se adapte a tus necesidades, no dudes en contactarnos para que uno de nuestros especialistas te ayude a escoger la mejor solución.
En Electrónica Universal de Monterrey manejamos stock de entrega inmediata en marcas como Carlo Gavazzi, Zenso y Crouzet.





Fuente: Carlo Gavazzi, (s/f). How to Properly Select an Inductive Proximity Sensor. https://www.gavazzionline.com/pdf/MD_ED%20Carlo%20Gavazzi%20May_Top%20Tips_Inductive_Proximity_FINAL.pdf
Leer mas contenido:

Multímetro Digital VS Pinza Amperimétrica
Multímetro digital vs Pinza amperimétrica Lo que sabe…

Serie 60 de Finder: Relé industrial 6 – 10 A
Serie 60 de Finder: Relé industrial 6 –…

Interruptores Termomagnéticos de Caja Moldeada de Eaton
Interruptores en Caja Moldeada Los interruptores de caja…